El sensor de velocidad de salida de la transmisión es típicamente un dispositivo de efecto Hall. La señal de salida de onda cuadrada está normalmente en la clavija C del conector. Este sensor, generalmente, requiere entre +10V y 12 Volt en la clavija “A” para alimentar el circuito electrónico interno. Este voltaje es suministrado por el modulo electrónico correspondiente a la aplicación.

Es importante, cuando se instala el sensor, que el cabezal deslizante del sensor esté completamente extendido y en contacto con la parte superior, o alta, del diente del engranaje. Si el cabezal no estuviera completamente extendida, el espacio libre puede no estar lo suficientemente cerca. Si en la instalación la cabeza no hace contacto con la parte alta del diente, ésta puede romperse.
En algunos casos en que la velocidad de salida de la transmisión no se usa para propósitos de control y no es crucial para la operación de la máquina, puede utilizarse un sensor de velocidad magnético. Esto lo determina ingeniería.
Estos componentes poseen un cabezal de plástico, el cual se debe ajustar antes de ser instalado. Para ajustar o calibrar este cabezal se debe extender completamente con la ayuda de un destornillador de paleta o plano, al estar completamente extendido su longitud es de 10 mm. aproximadamente. Al instalar el sensor en el orificio, independiente de la aplicación, se debe tener precaución de que éste, enfrente la parte alta del diente de lo contrario sufrirá daños irreparables el cabezal del sensor. En la figura siguiente se puede apreciar mas claramente.

Medidas realizadas a un sensor de frecuencia electrónico, cuya aplicación corresponde a un sensor de velocidad y tiempo en un motor de inyección electrónica.
1.- El voltaje medido entre A y B debe estar entre 12y 13 Volt.
2.- El Voltaje medido entre el terminal C y el B con la llave de encendido conectada motor detenido, debe ser menor de 3 Volt. o mayor de 10 Volt.
3.- Durante el arranque, el voltaje medido entre los terminales C Y B debe estar entre 2 y 4 volt.
La figura de abajo muestra un sensor típico de sincronización de velocidad que genera una señal de salida digital determinada por el patrón de dientes de la rueda giratoria.
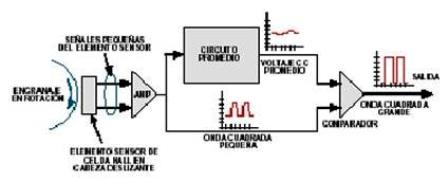
El control electrónico cuenta cada pulso y determina la velocidad, memoriza el patrón (único patrón de dientes) de los impulsos y compara ese patrón con un estándar diseñado para determinar la posición del cigüeñal y el sentido de giro. Un sensor de sincronización de velocidad es diferente a una señal de efecto Hall típica, debido a que el tiempo de aparición exacta de la señal se programa en el ECM del motor, para hacer que la señal se use en la función crucial de sincronización.



