Los sistemas de control electrónico controlan la operación de los diferentes sistemas de la máquina, también se comunican con el operador y el técnico de servicio, muestran la información a través del sistema monitor. El sistema general de control electrónico, usa las computadoras para controlar la operación de cada uno de esos sistemas. Las computadoras son los Módulos de Control Electrónico ECM que se programan para activar los componentes que, a su vez, realizan las diversas funciones de la máquina.
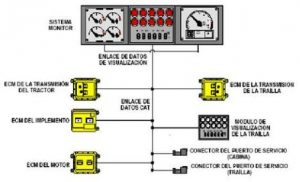
Las computadoras son los Módulos de Control Electrónico ECM que se programan para activar los componentes que, a su vez, realizan las funciones de la máquina, como los cambios de marcha de la transmisión, activación de los inyectores para controlar la inyección de combustible la activación de cilindros hidráulicos, o alertar al operador acerca de un problema o falla del sistema. Todos estos sistemas se interconectan a través del enlace de datos llamado Cat Data Linko Enlace de datos Cat; este enlace contempla también la conexión con un puerto de servicio.
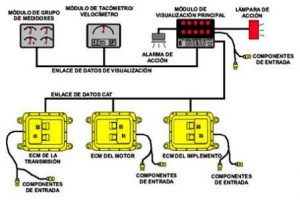
El hardware del sistema monitor instalado en algunos Bull Dozer, Cargadores de Ruedas y camiones medianos consta de un Módulo de Visualización Principal, un Módulo de Grupo de Medidores y un Módulo Optativo de Velocímetro/ Tacómetro, conectados a diferentes componentes de entrada y de salida. El hardware del sistema monitor instalado en otras máquinas puede no tener el Grupo de Medidores y/o el Módulo de Velocímetro/ Tacómetro, pero las funciones del sistema principal son las mismas.

En la sección de los indicadores de alerta se usan entradas de interruptores, sensores, emisores o sender y el Enlace de Datos CAT, para alertar al operador de condiciones anormales de la máquina. El área de visualización digital proporciona una lectura de seis dígitos con la información del horómetro de la máquina, la velocidad del motor, el kilometraje y los datos de diagnóstico. También, parte del área de visualización se usa para proveer indicación de unidades, como C°, kPa, MILLAS, RPM, LITROS y Km/h. Los indicadores se ACTIVAN o se DESACTIVAN de acuerdo con la información mostrada en la lectura de seis dígitos.
También hay un indicador de código de servicio (en el área de visualización), para señalar si hay una falla registrada en las modalidades de servicio y desplazamiento de datos de diagnóstico. En el Módulo de Visualización Principal se utiliza un par de enlaces de comunicación para permitir un paso de comunicación entre otros controles electrónicos y varios módulos de visualización. El Enlace de Datos CAT se usa para la comunicación con otros controles electrónicos. Este enlace de Datos es bidireccional, lo cual permite a los diferentes módulos electrónicos compartir información, El otro paso de comunicación es el Enlace de Datos de Visualización. Este enlace comunica información de ida y vuelta entre el Módulo de velocímetro / tacómetro. El Enlace de Datos CAT y el Enlace de Datos de Visualización se usan en muchos otros productos, como el Sistema Monitor Computarizado y el Sistema de Administración de Información Vital.

- Temperatura del refrigerante del motor (arriba a la izquierda)
- Temperatura de aceite de la transmisión (arriba a la derecha)
- Temperatura de aceite hidráulico (abajo a la izquierda)
- Nivel de combustible (abajo a la derecha)
El tipo y la cantidad de medidores usados en el grupo pueden variar de acuerdo con la aplicación. En algunas máquinas se pueden usar hasta dos Módulos del Grupo de Medidores. Para determinar qué funciones se usan una máquina en particular, vea el Manual de Operación y Mantenimiento correspondiente.

En el Sistema Monitor Caterpillar CMS. el módulo de visualización principal toma decisiones con base en las entradas de los diferentes interruptores, emisores y sensores instalados en el sistema, así como de los datos del Enlace de Datos CAT. Las entradas le indican al Módulo de Visualización Principal cómo operar y la condición de los sistemas de la máquina.
Existen tres tipos de entradas directas: de interruptor, de emisor y de sensor. Algunas de estas entradas son multipropósito, por ejemplo: Los contactos 7, 17, 27 y 37 del Módulo de Visualización Principal pueden ser entradas de interruptor o de sensor PWM. – Los contactos 9 y 18 del Módulo de Visualización Principal pueden ser entradas de interruptor o de emisor (sender) de 0 a 240 ohmios. – Los contactos 8, 10, 28 y 38 del Módulo de Visualización Principal pueden ser entradas de interruptor, de sensor PWM o de emisor de 70 a 800ohmios.



