
El sistema de red Bus Lin es la abreviatura de Local Interconnect Network. Este tipo de red de comunicación, se utiliza de manera auxiliar a la Red Can principal y su objetivo principal es conectar accesorios del vehículo a bajo costo.
Las redes CAN utilizan un sistema de multiplexado automotriz, que es un tipo de instalación del cableado que exige duplicar la cantidad de material conductor especial para datos.
Esto es necesario porque los datos viajan por dos cables de manera simultánea.
A diferencia de la red CAN, el Bus Lin sólo utiliza un cable para transmitir los datos.
Esta subred se conecta con accesorios como Wiper (Limpiaparabrisas), elevavidrios, luces de accesorio, etc.
Por lo tanto esto permite reducir los costos de las instalaciones, conservando unos principios de seguridad que explicaremos a continuación.
Cómo funciona una Bus Lin Network Automotriz
La comunicación a través de una red Bus Lin funciona de la siguiente manera:
Los datos de un Nodo maestro, viajan a través de la red y llega hasta donde cada uno de los módulos esclavos de la misma red.
En este recorrido envía una petición de información a cada nodo o módulo esclavo y envía datos de respuesta a dichas peticiones de información realizadas por el nodo maestro.
El nodo maestro controla y se asegura de que los marcos de datos se envíen con el intervalo y la periodicidad correctos.
Además asegura que cada marco o conjunto de datos tenga suficiente espacio de tiempo en el bus.
Para que el sistema funcione de manera adecuada, al nodo maestro se le debe cargar una configuración mediante unos archivos de tipo LCF o Lin Configuration File.
Estos archivos contienen la secuencia de las peticiones de información a los módulos esclavos, así como la frecuencia de dichas solicitudes.
Diagnóstico del Bus Lin Automotriz
La red de Bus Lin no está conectado directamente al conector de diagnóstico o DCL del sistema OBD2. Por lo tanto no hay manera de comunicar directamente con el Bus Lin mediante el Scanner Automotriz o Interfaz de diagnóstico.
Para poder acceder a la misma, es necesario que el Scanner se comunique primero con el módulo o nodo maestro y así obtendrá los datos que se requieren para intervenir la red y diagnosticar.
Por ejemplo, supongamos que el módulo o nodo maestro es el BCM Body Control Module: en ese caso mediante el Scanner podemos acceder a este módulo utilizando la comunicación de la red CAN de alta velocidad.
Luego el BCM se comunica con los interruptores de los eleva vidrios y los interruptores del bloqueo de las puerta mediante el Bus Lin.
Usted puede dar una acción con el Scanner mediante la red CAN HS al BCM, para que éste la ejecute con cualquiera de estos interruptores antes mencionados.
Pero el BCM enviará esta orden directamente al interruptor mediante el Bus Lin.
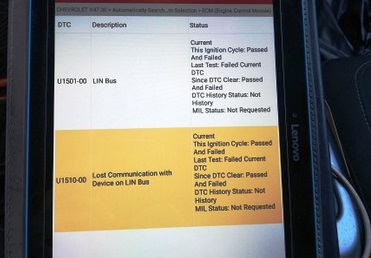
Si hay una pérdida de comunicación de datos en serie, entre cualquiera de los nodos LIN en la red de bus LIN, el nodo o módulo de control maestro establecerá un código de “Error en la Comunicación” con el dispositivo LIN aislado.
Cada módulo tanto maestro como esclavo envía 12 Voltios cuando está comunicando (De 11 a 12 Voltios aproximadamente).
Por esta razón, es importante tener en cuenta, que cuando se está trabajando en la detección de fallos sobre el Bus Lin, debes garantizar que el voltaje de batería se sostenga en los 12 Voltios.
Para esto puedes conectar la batería a un regulador de carga.
Despertando la red Bus Lin
Cuando usted coloca contacto o enciende el vehículo, el módulo de control maestro despierta la red Bus Lin y así mismo a los módulos o nodos esclavos.
Si alguno de estos dispositivos esclavos no envía la señal la respuesta de activación, entonces se crea un Código de Falla DTC. Por ejemplo U1510 Pérdida de comunicación con el módulo de control HVAC.
Cuando esto sucede el módulo de control maestro seguirá enviando mensajes al dispositivo esclavo Lin hasta tener una respuesta.
La red también se puede “despertar” a la inversa. Este caso se presenta cuando hay un interruptor esclavo que se activa y necesita comunicarlo al módulo maestro.
Es el caso del interruptor de puertas abiertas, que comparte el cableado con el motor del elevavidrios, el cual a su vez está comunicado mediante Bus Lin al Body Control Module o Módulo de la Carrocería.
Si usted abre la puerta, entonces este interruptor envía un voltaje que hace que el motor del elevavidrios (Nodo Esclavo del Bus Lin) envíe un mensaje.
Mediante este mensaje “despierta” al Módulo de la Carrocería para que active la luz interior de cortesía.
Recomendaciones para Solución de Fallos de Comunicación Consejos de diagnóstico
Las siguientes recomendaciones te ayudarán a solucionar fallos comunes en servicios sobre la red Bus Lin en tu taller automotriz:
- La red Bus Lin cuenta con un solo cable. Por lo tanto muchas fallas se originan por cortos en la red a partir de daños sobre este cableado. Altas temperaturas, sobre voltajes, cables con resistencias elevadas en Ohms. Cables que se van a tierra o conexiones deficientes en los terminales. Para rastrear estas anomalías debe comprobar continuidad en el cableado.
- Instalación de accesorios: revise si en alguna parte del circuito de la red Bus Lin, hay instalados accesorios de iluminación, audio u otros elementos que no sean los originales de fábrica. Ya que muchas veces se realizan este tipo de trabajos y se utiliza el cable de la red Lin, ya que el técnico al medir percibe que hay 12 Voltios y realiza un empalme.
- Busque la falla por zonas: una manera sencilla de solucionar fallos sobre la red Lin es determinar las zonas donde hay anomalías, mediante la comprobación de elementos esclavos adicionales de la red Lin. Por ejemplo si el auto es una SUV y no activa el Limpia vidrios trasero, verifique también si está activando el interruptor de apertura la de quinta puerta. Así podrá ubicar si ese sector está incomunicado del módulo maestro completamente.
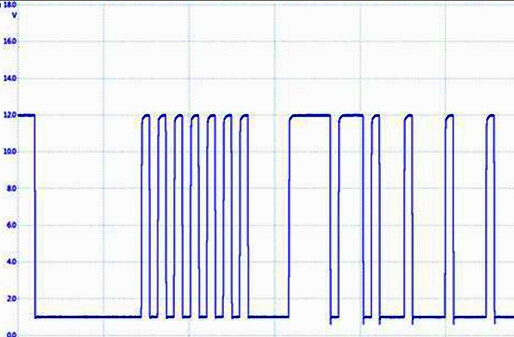
- Compruebe con el Osciloscopio la señal que sale desde el módulo maestro. Esta señal debe estar entre 1 y 12 Voltios. Cuando hay comunicación esta señal está constantemente oscilando entre esos valores. Así comprobará si el daño puede estar dentro del módulo maestro.
Si deseas aprender todo sobre redes de comunicación, te invitamos a participar en el curso Redes Can y Sistemas Multiplexados.
Mediante este curso certificado adquieres los conocimientos y técnicas necesarias para intervenir estos sistemas.
Los trabajos profesionales sobre redes son altamente rentables, y además abre un abanico de posibilidades en tu taller automotriz. Te esperamos en este curso para que lleves tu conocimiento al siguiente nivel.






7 Comentarios
Muy bien explicado a detalle excelente asesoramiento
¡Excelente artículo! Los consejos de diagnóstico para las redes automotrices son muy útiles. Me ayudaron a entender mejor cómo funcionan los buses en los vehículos. Gracias por la información detallada y clara.
Estimado Feliciano, estaremos enviando a usted, la información de los cursos solicitados. Saludos de parte de todo el equipo de Auto Avance
Hola Christian, gracias por tu valioso aporte. Te informamos que los cursos tienen un tiempo de acceso de 3 meses, sin embargo si requieres tiempo adicional por algún motivo, con gusto podemos extender tu acceso sin ningún costo. Saludos de parte de todo el equipo de Auto Avance !!
Yo Quiero un curso de detroit o cummins
excelente información. los cursos son de un solo pago y es tuyo de por vida o solo son con fecha limite con ingreso sujeto a contraseña?
Me interesa este curso d LDWS