
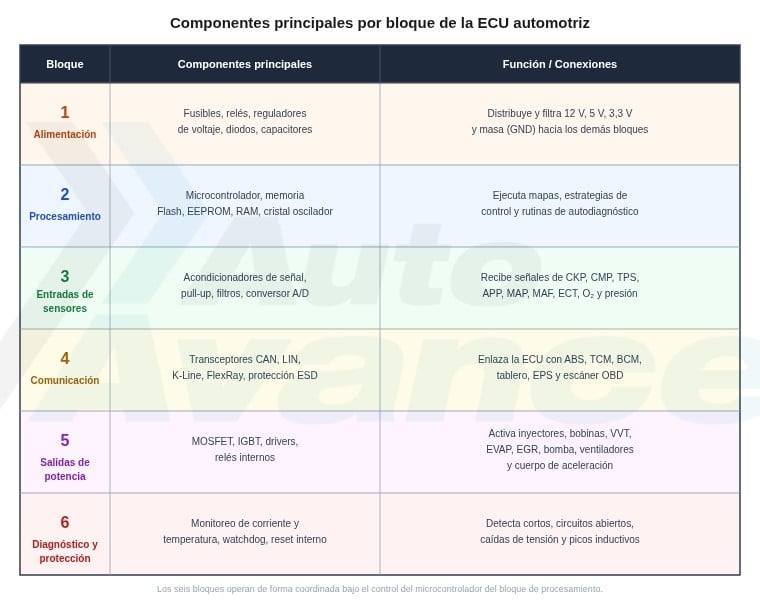
La ECU es el módulo electrónico que coordina el funcionamiento del motor y de varios sistemas del vehículo. En su interior, los componentes de la ECU automotriz se agrupan en bloques funcionales independientes, cada uno encargado de una tarea concreta dentro del proceso de control: recibir datos, procesarlos, comunicarlos y ejecutar una respuesta sobre los actuadores. Esta organización por bloques es la base del diseño de cualquier unidad de control electrónico moderna.
Identificar estos bloques resulta útil durante el diagnóstico. Un síntoma como pérdida de comunicación con el escáner, un actuador que no responde o un reinicio inesperado del motor puede rastrearse hasta un bloque específico dentro de la unidad de control. Este artículo describe los seis bloques principales de la ECU junto con los componentes electrónicos que integra cada uno.
Bloque de alimentación: la base eléctrica de la ECU
El bloque de alimentación recibe la energía de la batería del vehículo y la distribuye, regulada y filtrada, hacia el resto de los circuitos internos. Sin una alimentación estable, el microcontrolador, los conversores de señal y las etapas de salida no operan con precisión.
Reguladores de voltaje y líneas de distribución
La ECU recibe alimentación nominal de 12 V desde la batería a través de un relé principal. A partir de esa tensión, los reguladores de voltaje generan las líneas internas de trabajo: 5 V para la referencia de los sensores analógicos y para los circuitos lógicos periféricos, y una línea de masa o negativo común para todo el sistema. En los microcontroladores actuales, un segundo regulador reduce la tensión a 3,3 V o menos para alimentar el núcleo de procesamiento. Esta etapa adicional no siempre se menciona en los esquemas básicos, pero es estándar en el diseño de las unidades de control modernas.
Fusibles, relés, diodos y capacitores de protección
Los fusibles interrumpen el circuito ante una sobrecorriente y protegen el cableado y los componentes internos frente a un cortocircuito externo. Los relés conmutan la alimentación principal de la ECU y de los circuitos de potencia bajo el comando del microcontrolador. Los diodos de protección bloquean la conexión de polaridad inversa y absorben transitorios de voltaje provenientes del sistema eléctrico del vehículo. Los capacitores filtran el rizado de la fuente y estabilizan las líneas de 12 V y 5 V frente a variaciones bruscas de carga, como el arranque del motor o la conexión de un consumidor de alta corriente.
Bloque de procesamiento: el núcleo de cálculo de la ECU
El microcontrolador como unidad central
El microcontrolador ejecuta los mapas de inyección, encendido y las estrategias de control programadas por el fabricante. Procesa de forma simultánea las señales digitalizadas de los sensores, calcula los tiempos de activación de cada actuador y ejecuta las rutinas de autodiagnóstico del sistema. La velocidad de procesamiento determina la resolución con la que la ECU ajusta la inyección y el encendido en cada ciclo del motor.
Memorias Flash, EEPROM y RAM
El microcontrolador trabaja junto con tres tipos de memoria, cada una con una función distinta. La memoria Flash almacena el firmware y los mapas de calibración del fabricante; es no volátil y se reprograma durante una actualización de software o una reprogramación de la ECU. Luego, la memoria EEPROM guarda información que debe conservarse aunque se desconecte la batería: valores adaptativos de mezcla y ralentí, código del inmovilizador y kilometraje, entre otros datos según el fabricante. Finalmente, la memoria RAM almacena los datos de trabajo durante la operación del motor y su contenido se borra al apagar el motor.
Cristal oscilador y temporización
El cristal oscilador genera la señal de reloj que sincroniza todas las operaciones internas del microcontrolador. Esta referencia de tiempo es la base para calcular los ángulos de inyección y encendido en función de la señal del CKP, y para coordinar la comunicación con los demás módulos del vehículo. La frecuencia exacta del cristal varía según el fabricante y el modelo del microcontrolador; no existe un valor único de referencia aplicable a todas las ECU.
Bloque de entradas de sensores: la recepción de señales
Acondicionamiento de señal y conversión A/D
Antes de llegar al microcontrolador, cada señal de sensor pasa por un circuito acondicionador. Este circuito incluye resistencias pull-up, que fijan el nivel de referencia en sensores tipo Hall o de salida de colector abierto, y filtros que eliminan el ruido eléctrico de alta frecuencia generado por el sistema de encendido y los motores eléctricos del vehículo. El conversor analógico-digital (A/D) transforma las señales de voltaje continuo en valores numéricos que el microcontrolador puede procesar.
Sensores de posición y temperatura
El bloque de entradas recibe líneas dedicadas para el sensor CKP (posición del cigüeñal) y el sensor CMP (posición del árbol de levas), cuyas señales sincronizan la inyección y el encendido con el ciclo del motor. También recibe la señal del TPS (posición de la mariposa de aceleración), del APP (posición del pedal acelerador) en sistemas de aceleración electrónica, y del ECT (temperatura del refrigerante del motor), que la ECU utiliza para ajustar la mezcla y el ralentí en frío.
Sensores de carga del motor y composición de gases
Las líneas del MAP (presión absoluta del múltiple), el MAF (masa de aire), el sensor de oxígeno y los sensores de presión de combustible o de aceite completan el bloque de entradas. Estas señales, propias de los sensores del motor, determinan la carga real del motor y la composición de la mezcla aire-combustible, datos que el microcontrolador utiliza para calcular el tiempo de inyección y el avance de encendido en cada ciclo.
Bloque de comunicación: integración con otros módulos
Transceptores CAN, LIN, K-Line y FlexRay
El bloque de comunicación conecta la ECU con el resto de los módulos electrónicos del vehículo mediante transceptores específicos para cada protocolo. El bus CAN (Controller Area Network) es la red principal de comunicación entre módulos de control en la mayoría de los vehículos modernos. El bus LIN (Local Interconnect Network) opera a menor velocidad y conecta actuadores y sensores periféricos. El protocolo K-Line es una línea de diagnóstico de un solo hilo, presente en sistemas anteriores a la generalización del CAN para diagnóstico OBD. El bus FlexRay opera a mayor velocidad que el CAN y se reserva para sistemas de control de chasis y seguridad en las plataformas que lo incorporan.
Protección ESD y enlace con otros módulos
Las líneas de comunicación incluyen circuitos de protección contra descargas electrostáticas (ESD), ya que están más expuestas a transitorios provenientes del arnés del vehículo que las líneas internas de la ECU. A través de estos buses, la ECU intercambia información con el módulo ABS, la transmisión (TCM), el módulo de carrocería (BCM), el tablero de instrumentos, la dirección asistida eléctrica (EPS) y el escáner de diagnóstico conectado al puerto OBD.
Bloque de salidas de potencia: activación de actuadores
MOSFET, IGBT y drivers de potencia
Las salidas de potencia activan los actuadores del motor mediante etapas de conmutación de alta corriente. El MOSFET (Metal-Oxide-Semiconductor Field-Effect Transistor) es el elemento de conmutación más usado para activar los inyectores de combustible, debido a su baja resistencia en conducción y su alta velocidad de conmutación. El IGBT (Insulated Gate Bipolar Transistor) se emplea en el circuito primario de las bobinas de encendido, donde debe manejar la corriente de carga de la bobina y soportar el pico de voltaje generado al cortar el circuito. Cada salida cuenta con un driver: un circuito que adapta la señal lógica del microcontrolador a la corriente necesaria para activar el MOSFET o el IGBT correspondiente. Algunas ECU integran relés internos para activar circuitos de mayor consumo, como la bomba de combustible o los ventiladores de enfriamiento.
Actuadores controlados desde el bloque de salidas
El bloque de salidas controla los inyectores de combustible, las bobinas de encendido, las válvulas VVT (variable valve timing) que ajustan el tiempo de apertura de las válvulas, el solenoide de purga del sistema EVAP (control de emisiones evaporativas), la válvula EGR (recirculación de gases de escape), el relé de la bomba de combustible, los ventiladores de enfriamiento y el motor del cuerpo de aceleración electrónico.
Bloque de diagnóstico y protección: supervisión continua
Monitoreo de fallas eléctricas
El bloque de diagnóstico y protección supervisa de forma continua el estado eléctrico de los circuitos de la ECU. Monitorea la corriente que circula por cada salida de potencia, la temperatura de los componentes críticos, los cortocircuitos a masa o a positivo, los circuitos abiertos y las caídas de tensión fuera de rango en las líneas de alimentación. Cuando detecta una condición fuera de los parámetros esperados, registra un código de falla y, según la estrategia del fabricante, desactiva la salida afectada o activa un modo de funcionamiento limitado.
Watchdog, reset interno y protección contra picos inductivos
El watchdog es un temporizador que supervisa la ejecución del software del microcontrolador. Si el software no responde dentro del tiempo esperado, el watchdog fuerza un reset interno de la ECU para devolver el sistema a un estado conocido. Los circuitos de protección contra picos inductivos absorben la energía liberada al desactivar estos componentes y protegen los MOSFET e IGBT del bloque de salidas de potencia.
Diagnóstico por bloques: la utilidad práctica de conocer los componentes de la ECU automotriz
Conocer los componentes de la ECU automotriz por bloques permite ubicar con mayor precisión el origen de una falla. Un motor que no enciende y no se comunica con el escáner apunta al bloque de alimentación o de procesamiento. Un actuador que no responde a pesar de recibir el comando correcto apunta al bloque de salidas de potencia. Una pérdida de comunicación con un módulo específico, sin afectar al resto del vehículo, apunta al transceptor correspondiente dentro del bloque de comunicación. Esta lógica de diagnóstico por bloques reduce el tiempo de búsqueda y evita el reemplazo de componentes sin diagnóstico previo.





